
Le RTH (Retun To Home) est le retour à la maison ou plutôt au point de départ de votre drone. C'est une fonction très importante pour la sécurité de votre insecte, elle a beaucoup évoluée avec l'apparition du Mavic, simple à utiliser mais complexe dans ses options, elle mérite une petite attention.
ENREGISTREMENT DU POINT HOME
Cela peut sembler évident, mais pour que le RTH se fasse dans de bonnes conditions, il est nécessaire que le point Home soit enregistré. La mémorisation de celui-ci se fait dans DJI Go avant même que le décollage soit fait.
Pour qu'il soit mémorisé, il est nécessaire que le signal GPS soit de bonne qualité (plus de 6 satellites) et lors de son enregistrement, une icône H apparait sur votre écran, un signal sonore retentit avec la mention 'Home Point updated' et le voyant d'état arrière du Mavic clignote rapidement, dès lors le point Home est mémorisé dans le Mavic même, à l'endroit où vous l'avez posé pour le décollage.
Vous pouvez dès cet instant partir rassuré.
PARAMÈTRES IMPORTANTS POUR LE RTH
Nous allons voir qu'il existe plusieurs types de RTH, et certaines conditions sont à respecter :
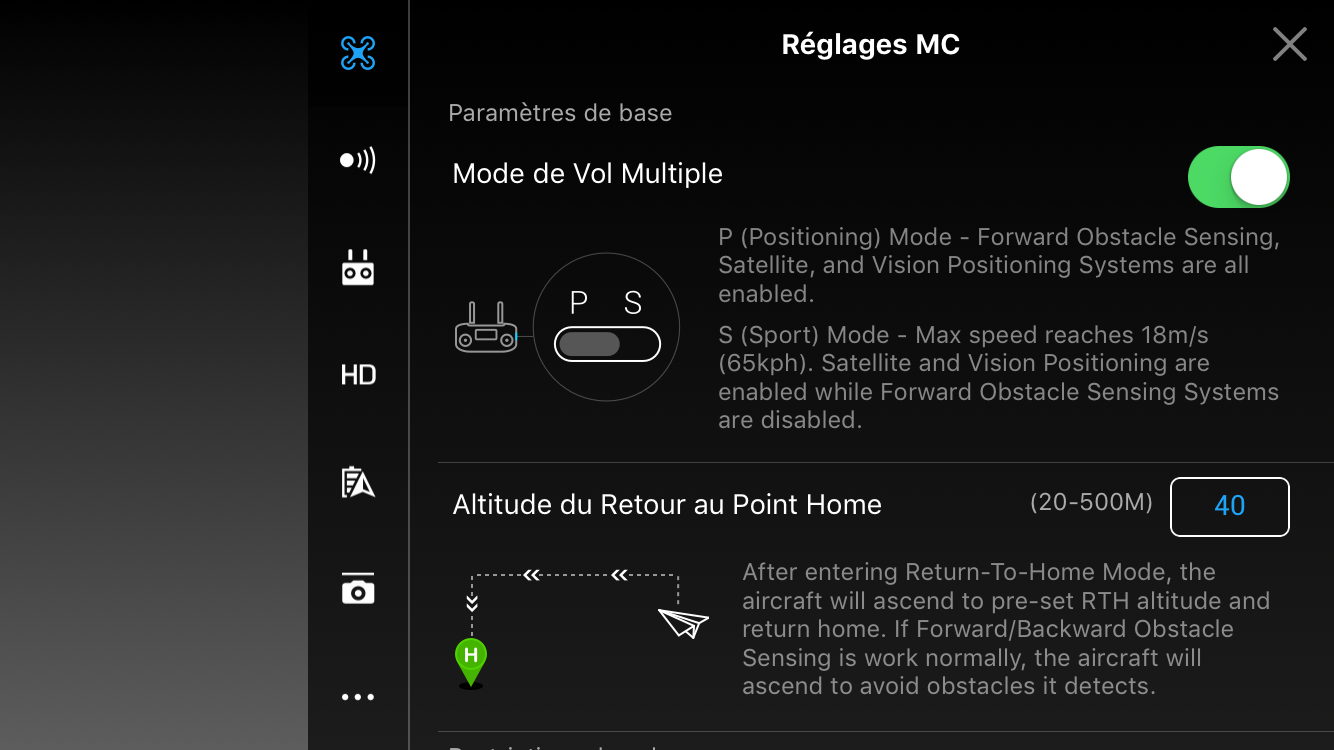
- Définition d'une altitude de RTH (Altitude FailSafe). Dans DJI Go 4, accédez aux réglages MC et donnez une altitude de RTH. Cette altitude sera à définir avant tout vol en fonction des types d'obstacles du plan de vol (arbres, lignes électriques, etc...)
- Activation du RTH lors de perte du signal RC dans les réglages avancés du même menu. Activez également le Smart Return to Home qui lui gèrera le RTH en cas de batterie faible comme nous verrons plus loin.

- Activation du système optique avant, l'appareil pourra ainsi détecter et éviter les obstacles. Pour que ce système fonctionne de manière optimale, il faut que la luminosité soit suffisante et donc est inopérant lors de vols de nuit (qui sont prohibés). L'activation de ce système interdit tout vol vers la droite ou la gauche, le drone ne pourra que voler vers l'avant et ainsi rendre efficace la détection.

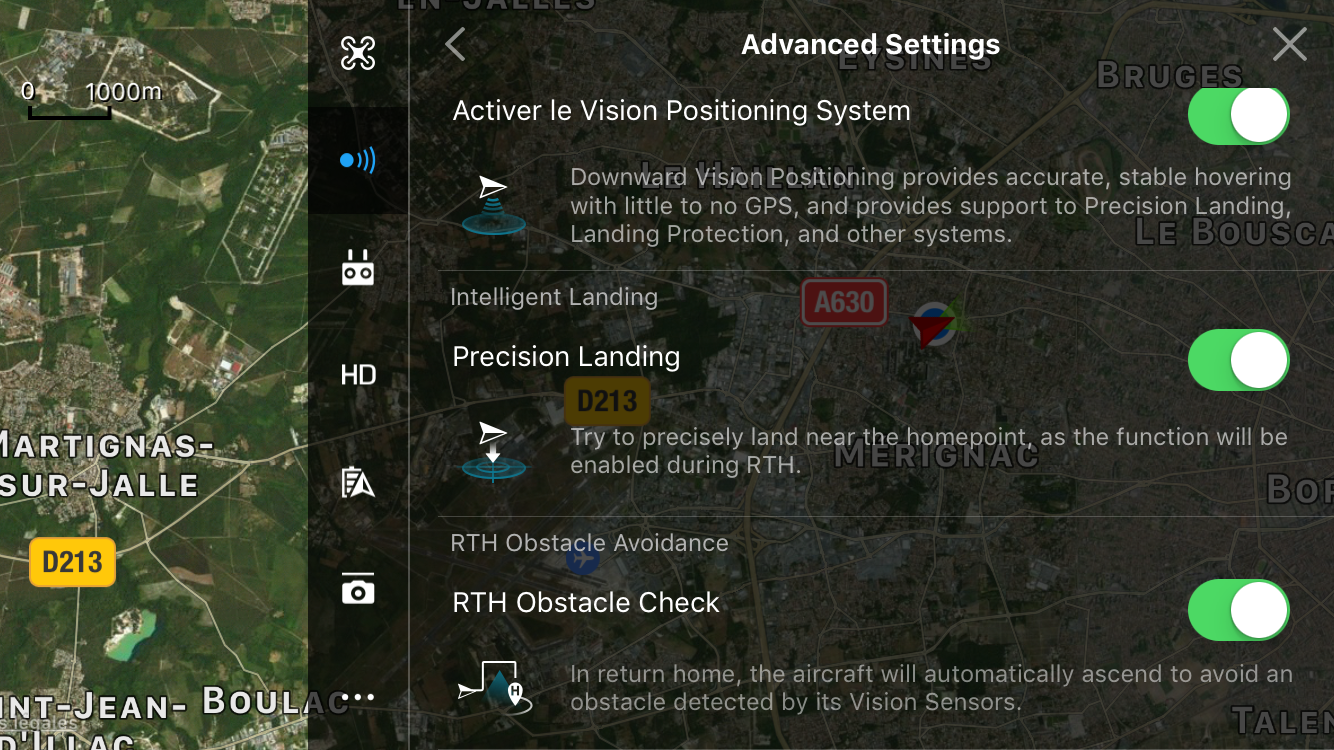
- Activation du VPS dans le même menu mais descendez sur le choix réglages avancés. Cela sera utile pour la stabilité lors de l'atterrissage et pour autoriser les caméras inférieures à prendre une photo du point de décollage. C'est ici aussi que vous pourrez activer l'option pour le Precision Landing, à noter que cette option n'apparait pas si vous êtes en mode ATTI. Activez aussi RTH Obstacle Check pour activer la fonction d'évitement d'obstacle lors du RTH.
LES TYPES DE RTH
Il existe 4 types de RTH :- RTH de sécurité
- RTH en cas de batterie faible
- RTH intelligent
- RTH Me
Cette procédure de sécurité pour le RTH s'active automatiquement si le signal de la radio commande est perdu pendant une durée spécifique (3 secondes en cas de pilotage avec RC ou 20 secondes lors d'un pilotage en Wi-Fi). Le drone montera automatiquement à l'altitude FailSafe mémorisée ou restera au dessus s'il est positionné plus haut.
Dès que la connexion avec l'appareil est rétablie, le pilote peut intervenir sur le RTH (en appuyant sur le bouton de la radio-commande ou sur l’icône d'annulation en forme de croix rouge sur l'écran) et reprendre la main.
Si aucune intervention de l'opérateur n'est faite, le Mavic reviendra automatiquement à son point de départ en passant les éventuels obstacles présents sur sa route qu'il évitera en faisant une manœuvre ascensionnelle et continuera à revenir à cette nouvelle altitude atteinte.
2 - RTH Intelligent
Cette fonction est déclenchée manuellement et intentionnellement par le pilote, soit en appuyant sur le bouton RTH de la radio-commande pendant quelques secondes, soit en appuyant dur le bouton RTH de l'application DJI Go 4.
L'appareil peut choisir de naviguer entre les obstacles ou de maintenir un vol stationnaire pour éviter toute collision. L'utilisateur peut diriger l'appareil manuellement pour éviter les obstacles si le système optique avant est désactivé ou si la luminosité est faible. Le pilote peut aussi immédiatement quitter la procédure RTH intelligent avec le bouton Pause de la fonction Vol sur la radiocommande, ou en appuyant sur l'icône Stop dans l'application DJI GO 4.
3 - RTH en cas de batterie faible
Le mode de sécurité en cas de batterie faible se déclenche lorsque la charge de l'Intelligent Flight Battery DJI risque de ne pas être suffisante pour assurer le retour de l'appareil. Il est conseillé aux utilisateurs de faire revenir l'appareil au point de départ ou de le faire atterrir immédiatement s'ils y sont invités.
En cas de batterie faible, l'application DJI GO 4 affiche un avertissement. L'appareil retourne automatiquement au point de départ si aucune mesure n'est prise dans un délai de 10 secondes à l'altitude FailSafe programmée au au dessus s'il est positionné plus haut.
L'utilisateur peut annuler la procédure de retour en appuyant sur le bouton RTH de la radiocommande, mais en mode FailSafe, il est fortement conseillé d'écouter ce que dit le système (ça m'a sauvé de crash mon Phantom 3 à au moins 2 vols lors de tests extrêmes).
Les seuils correspondants à ces avertissements sont définis automatiquement en fonction de l'altitude actuelle de l'appareil et de sa distance par rapport au point de départ.
L'utilisateur peut annuler la procédure de retour en appuyant sur le bouton RTH de la radiocommande, mais en mode FailSafe, il est fortement conseillé d'écouter ce que dit le système (ça m'a sauvé de crash mon Phantom 3 à au moins 2 vols lors de tests extrêmes).
Les seuils correspondants à ces avertissements sont définis automatiquement en fonction de l'altitude actuelle de l'appareil et de sa distance par rapport au point de départ.
Attention : Lorsque la charge de batterie atteint le niveau minimal requis pour faire atterrir l'appareil depuis l'altitude actuelle, la procédure d'atterrissage est lancée automatiquement et la radiocommande fait retentir une alarme. L'utilisateur peut continuer d'utiliser la radiocommande pour contrôler l'orientation de l'appareil pendant le processus d'atterrissage ainsi qu'actionner le manche gauche vers le haut pour maintenir l'altitude de l'appareil et le conduire à un emplacement plus propice à l'atterrissage.
4 - RTH Me
4 - RTH Me
Ce type de RTH est un peu particulier, il va ramener votre drone non pas au point de décollage, mais à l'endroit où vous vous trouvez, ou plutôt à l'endroit où se trouve la télécommande.
Ce réglage ne sera accessible que si votre téléphone connecté sur la radio-commande possède un GPS de façon à fournir des informations de positions à DJI Go. En effet les radio-commandes du Phantom 3, Mavic, Phantom 4 ou Phantom 4 Pro ne possèdent pas de module GPS inclus, à contrario des Inspire. Méfiez vous également si vous volez avec une tablette, assurez vous de la présence d'un module GPS pour pouvoir utiliser cette fonction.
Dans le cas où toutes les conditions sont réunies, une nouvelle ligne de réglages apparait dans le premier menu de DJI Go et vous permet de faire un positionnement du Point Home qui pourra être spécifié soit sur le drone (option par défaut) ou sur la RC et donc vous.

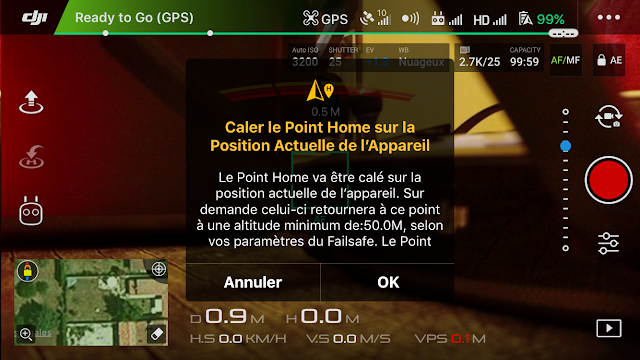
Lorsque vous cliquez sur l'icone drone, vous avez un message de confirmation du calage du point Home, c'est le calage normal qui vous permet toutes les fonctions de RTH ainsi que la fonction de Precise Landing qui se feront au point réel de décollage.
Ce réglage ne sera accessible que si votre téléphone connecté sur la radio-commande possède un GPS de façon à fournir des informations de positions à DJI Go. En effet les radio-commandes du Phantom 3, Mavic, Phantom 4 ou Phantom 4 Pro ne possèdent pas de module GPS inclus, à contrario des Inspire. Méfiez vous également si vous volez avec une tablette, assurez vous de la présence d'un module GPS pour pouvoir utiliser cette fonction.
Dans le cas où toutes les conditions sont réunies, une nouvelle ligne de réglages apparait dans le premier menu de DJI Go et vous permet de faire un positionnement du Point Home qui pourra être spécifié soit sur le drone (option par défaut) ou sur la RC et donc vous.

Lorsque vous cliquez sur l'icone drone, vous avez un message de confirmation du calage du point Home, c'est le calage normal qui vous permet toutes les fonctions de RTH ainsi que la fonction de Precise Landing qui se feront au point réel de décollage.

Lorsque vous réglez le point Home sur vous, un message vous donne la distance entre le drone et votre radio-commande. Ici dans cet exemple, la distance est de 4,4 mètres. Attention cependant car le GPS de votre téléphone est beaucoup moins précis que le GPS Glonass du drone, il y a une marge d'erreur de quelques mètres.

L’intérêt de cette option, c'est que vous pourrez créer un point Home dynamique. Vous posez le drone sur une colline et vous vous mettez dans la vallée, il viendra en RTH Me, atterrir à quelques mètres de vous. Vous décidez de prendre le petit chemin qui sent la noisette à gauche là et vous cliquez sur ce même icône bonhomme, hop, la nouvelle position de Me.Home est enregistrée et il viendra se poser non plus dans la vallée, mais sur le chemin en cas de RTH Me.
Il est possible ainsi lorsque votre drone est en l'air de modifier plusieurs fois ce point Home (qui devient donc dynamique) en fonction de vos déplacements.
Attention cependant, pour redéfinir un nouveau point Home sur votre RC, il est nécessaire que la connexion entre votre drone et l'application soit opérante. En effet la position GPS du point Home est envoyée et enregistrée sur le drone (sécurité en cas de perte de connexion) et donc il faut une liaison fiable pour définir le Me.Home.
Attendez que le processus soit complètement validé, c'est à dire que le nouveau point Home se matérialise bien sur la carte et que le drone clignote rapidement en vert, preuve qu'il a enregistré le nouveau point Home.
Ce RTH Me est moins précis que le RTH avec point Home fixé sur le point de décollage, il peut y avoir un hiatus de quelques mètres. Si vous comptez l'utiliser sur un bateau par exemple et le redéfinir en fonction de vos déplacements, il vaudra mieux le faire lors d'une mise en panne du bateau à proximité d'un mouillage sec. (je sais pas si ça existe un mouillage sec, mais bon c'est pour faire passer l'idée)
Bien entendu le RTH Me invalide complètement l'atterrissage de précision en raison des contraintes nécessaires pour l'efficacité de ce Precision Landing comme nous allons voir dans le prochain paragraphe.

L’intérêt de cette option, c'est que vous pourrez créer un point Home dynamique. Vous posez le drone sur une colline et vous vous mettez dans la vallée, il viendra en RTH Me, atterrir à quelques mètres de vous. Vous décidez de prendre le petit chemin qui sent la noisette à gauche là et vous cliquez sur ce même icône bonhomme, hop, la nouvelle position de Me.Home est enregistrée et il viendra se poser non plus dans la vallée, mais sur le chemin en cas de RTH Me.
Il est possible ainsi lorsque votre drone est en l'air de modifier plusieurs fois ce point Home (qui devient donc dynamique) en fonction de vos déplacements.
Attention cependant, pour redéfinir un nouveau point Home sur votre RC, il est nécessaire que la connexion entre votre drone et l'application soit opérante. En effet la position GPS du point Home est envoyée et enregistrée sur le drone (sécurité en cas de perte de connexion) et donc il faut une liaison fiable pour définir le Me.Home.
Attendez que le processus soit complètement validé, c'est à dire que le nouveau point Home se matérialise bien sur la carte et que le drone clignote rapidement en vert, preuve qu'il a enregistré le nouveau point Home.
Ce RTH Me est moins précis que le RTH avec point Home fixé sur le point de décollage, il peut y avoir un hiatus de quelques mètres. Si vous comptez l'utiliser sur un bateau par exemple et le redéfinir en fonction de vos déplacements, il vaudra mieux le faire lors d'une mise en panne du bateau à proximité d'un mouillage sec. (je sais pas si ça existe un mouillage sec, mais bon c'est pour faire passer l'idée)
Bien entendu le RTH Me invalide complètement l'atterrissage de précision en raison des contraintes nécessaires pour l'efficacité de ce Precision Landing comme nous allons voir dans le prochain paragraphe.
ATTERRISSAGE DE PRÉCISION - PRECISION LANDING
Lorsque cette fonction a été validée dans l'application, le Mavic Pro balaie et analyse automatiquement les caractéristiques du terrain au sol pendant le retour au point de départ. Lorsque le terrain actuel correspond au terrain du point de départ, le Mavic Pro commence à atterrir immédiatement pour effectuer un atterrissage de précision (Precision Landing).
Cette fonction très performante nécessite le respect de quelques conditions pour que le Mavic atterrisse au centimètre près sur le point de décollage :
- le Vision Positioning System doit avoir été activé dans les réglages du système de navigation visuelle dans système de navigation visuelle - réglages avancés
- activation du Precise Landing (système de navigation visuelle - réglages avancés). Le Mavic doit obligatoirement être en mode GPS. Le mode ATTI ne permet pas cette fonction.
- le point de départ est enregistré au décollage (enregistrement position GPS dans le drone) et ne peut pas être modifié pendant le vol
- le décollage doit se faire à la verticale (positionnement pour la photo inférieure) à une hauteur supérieure à 10 mètres d'après la doc, mais entre 5 et 10 m, c'est bon.
- marquer un temps de pose (prise de la photo par les caméras inférieures et en même temps l'autofocus se fait automatiquement) de façon à ce que les caméras inférieures mémorisent la zone de décollage
- une luminosité trop forte ou trop faible peut perturber la bonne reconnaissance photo du point de décollage. En décollant mettez la caméra vers le bas pour avoir une idée plus précise de la définition (une image cramée ou sous exposée sera inexploitable)
- utiliser une aire de décollage se démarquant du milieu environnant (type FlatHat vu dans un autre article), soit très contrastée par rapport au sol, soit uniforme mais d'une autre couleur que le sol. Évitez les couleurs brillantes ou réflectives (argent, or, etc...) qui réfléchissent trop la lumière.
 |
| Aire se démarquant du sol environnant. |
Lors de l'approche en Precision Landing, le Mavic va descendre vers le point Home (guidé vers le point Home par le GPS) et en phase finale, il se dirigera parfaitement vers le point de départ (comparatif photos prises au décollage) en faisant un mouvement de translation pour le positionner parfaitement au dessus du point initial.
Dans cette dernière vidéo, on voit bien que le RTH se fait en ciblant la vasque de fleurs, puis le Mavic passe en phase comparaison photos et il dévie automatiquement pour cibler le pad de décollage.
REMARQUES DE SÉCURITÉ
Le RTH ne peut se faire que si le Mavic est à plus de 20 mètres du point de départ. Il reviendra à l'altitude à laquelle il se trouve s'il est plus haut que l'altitude fixée dans l'application, ou montera à cette altitude s'il se trouve plus bas.
Entre 5 et 20 mètres du point de départ, le retour se fait à une altitude de 10 mètres s'il est à une hauteur inférieure, s'il est plus haut, il gardera son altitude.
A moins de 5 mètres du point de départ, la fonction RTH fait atterrir l'appareil lorsqu'elle est activée. Le Mavic se positionne à environ 1 m du sol et vous demande de confirmer l'atterrissage.
ÉVITEMENT DES OBSTACLES
Le système optique avant doit avoir été activé, le Mavic décélère en cas de détection d'obstacle à 15 mètres devant lui, s'arrête en vol stationnaire, et commence à monter verticalement pour arriver 5 mètres au dessus de l'obstacle, puis reprend le RTH.
La détection des obstacles ne peut se faire que à l'avant de l'appareil, pas en dessous ou sur les cotés.
CONCLUSION
Le RTH est un système très sophistiqué vous permettant de récupérer sans encombre votre Mavic, mais il est nécessaire de bien assimiler son fonctionnement pour éviter des déclenchements intempestifs sous des arbres par exemple ou ne pas avoir le résultat escompté en cas de mauvais réglages initiaux.
La fonction Precise Landing vous donnera des résultats incroyables à la condition de respecter quelques règles très simples.
Le bon réglage du RTH assure la survie de votre drone en cas de perte de signal, l'atterrissage de précision c'est pour épater la galerie, mais quand même !
La fonction Precise Landing vous donnera des résultats incroyables à la condition de respecter quelques règles très simples.
Le bon réglage du RTH assure la survie de votre drone en cas de perte de signal, l'atterrissage de précision c'est pour épater la galerie, mais quand même !
Excellent article... Et en plus bien rédigé ! :-) Merci !
RépondreSupprimersuper tuto Baroudeur ;)
RépondreSupprimerBonjour,
RépondreSupprimerDans : “Définition d'une altitude de RTH. Dans DJI Go 4, accédez aux réglages caméra”
remplacer “caméra” par “Main Control Settings ou MC (Principaux paramètres)”
me semble -t-il ! ...
@+ ocgall
Très bonne remarque ! Merci
SupprimerIl y en a qui lisent en détail, mais c'est bien !
Magnifiques explications...qui d'ailleurs devraient être dans le mode d'emploi (celui de 61 pages)
RépondreSupprimerEncore merci
Vraiment bravo pour l'article
RépondreSupprimerHello
RépondreSupprimerTrès intéressant comme blog, super tuto merci.
Je suis novice et j'ai un Mavic Pro depuis maintenant près de 2 semaines, c'est le même principe que pour le phantom, j'ai l'application DJI Go 4
Lors du décollage, le drone devrait se positionner à 1m20 du sol et attendre les commandes du pilote. Il m'arrive quelques fois et maintenant plus régulièrement que mon drone monte tout seul à une altitude supérieur. Ce n'est pas toujours le cas. Est-ce un mauvais paramétrage du point home ??
Je soupçonne mon Mavic d'atteindre la hauteur de 30 mètres de mon point home au lieu de rester à 1m20.
Ce 1m20 est paramètré en quelque part sur l'application ??
Merci pour votre aide
Bonjour
SupprimerLe point Home est mémorisé lors de la mise en route du Mavic, il n'y a pas de paramétrage particulier si ce n'est définir le point Home au niveau du drone ou de la RC, mais au premier décollage ces 2 points sont identiques.
Le décollage automatique (avec le bouton à l'écran) fait normalement décoller le drone qui vient se stabiliser à une hauteur de 1m20-1m50 effectivement, et ce sans aucun paramétrage à définir, mais pas plus (je n'utilise pas ce type de décollage). En tout cas il ne devrait pas monter à 30 m, je vais tester, peut être est-ce un bug causé par les dernières mises à jour.
Super article et bien fait, peut-être qu'il serait possible d'entourer les manips à faire en relation avec les photos ?....
RépondreSupprimerMais sinon bravo !